Animation for Lill's
Method
by Dan
Kalman
Lill's Method is a
graphical representation of the roots of a
polynomial, as described in my book Uncommon Excursions. It
was first presented by Lill, an Austrian military engineer, in 1867,
and has been described in print in English several times over the
intervening years. For more on Lill's Method, see Bradford's site http://www.concentric.net/~Pvb/ALG/rightpaths.html.
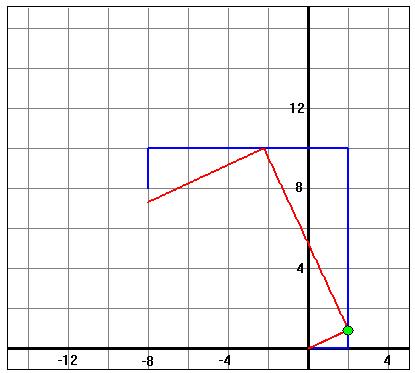 Below there are
links to some animated images showing Lill's Method in
action. In all the images, there are two polygonal paths,
one in red and one in blue. The legs of the blue path correspond
to the coefficients of a given polynomial. The path is drawn
starting at the origin, and executing a series of right angle turns.
The red path also is drawn with right angle turns. It begins at the
origin as well, and starts out at a
prescribed angle q. Each red leg ends on
a blue leg, or on the line containing that leg. The first red leg
ends on the second blue leg; the second red leg on the third blue
leg; etc. This is illustrateed in the figure at left for the
polynomial p(x)
=
2x3+10x2+10x+2 at an angle
of 25 degrees. Observe that the lengths of the blue legs are 2,
10, 10, and 2, respectively, matching the coefficients of p(x). Lill's result states that the final
points of the red and blue paths coincide for an angle
q if and only
if -tan(q) is a root of the
polynomial. Thus, we can visualize a dynamic approach to finding
the roots. Slide the green dot along the blue leg, looking for
configurations where the ends of the paths coincide. Each such
gives a root of p(x).
That is what the animations show.
Below there are
links to some animated images showing Lill's Method in
action. In all the images, there are two polygonal paths,
one in red and one in blue. The legs of the blue path correspond
to the coefficients of a given polynomial. The path is drawn
starting at the origin, and executing a series of right angle turns.
The red path also is drawn with right angle turns. It begins at the
origin as well, and starts out at a
prescribed angle q. Each red leg ends on
a blue leg, or on the line containing that leg. The first red leg
ends on the second blue leg; the second red leg on the third blue
leg; etc. This is illustrateed in the figure at left for the
polynomial p(x)
=
2x3+10x2+10x+2 at an angle
of 25 degrees. Observe that the lengths of the blue legs are 2,
10, 10, and 2, respectively, matching the coefficients of p(x). Lill's result states that the final
points of the red and blue paths coincide for an angle
q if and only
if -tan(q) is a root of the
polynomial. Thus, we can visualize a dynamic approach to finding
the roots. Slide the green dot along the blue leg, looking for
configurations where the ends of the paths coincide. Each such
gives a root of p(x).
That is what the animations show.
- First
Animation: dynamic version of the graph above. Note that the roots
of 2x3+10x2+10x+2 are -tan(15), -tan(45), and -tan(75)
(where the
angles are given in degrees), as derived here.
Look for the ends of the paths to coincide at angles of 15, 45, and 75
degrees.
- Second
Animation: An example with no real root.
The end of the red path never coincides with the end of the blue path.
- Third
Animation: red and blue paths with non-perpendicular legs.
Although Lill stated his result for right-angled paths, it works just
as well for paths with any fixed angle at each vertex. This
animation shows the method with a vertex angle of 75 degrees.
- Fourth
Animation: dynamic
variation of the path vertex angle. For these animations, the anle
q is held fixed and the turn angle at
each corner of the path is varied.
There are some nice applets for
Lill's method at Bradford's site.
His applet for quadratic equations is at http://www.concentric.net/~pvb/GEOM/quadraticapplet.html
and his cubic equation applet is at http://www.concentric.net/~pvb/GEOM/cubicapplet.html.